Projects
Radar Inertial Odometry
Robust accurate and highly efficient navigation even in degraded visual and GNSS degraded or denied environments using FMCW radar sensors and inertial sensing which can be used for any type of mobile robot. [Code]
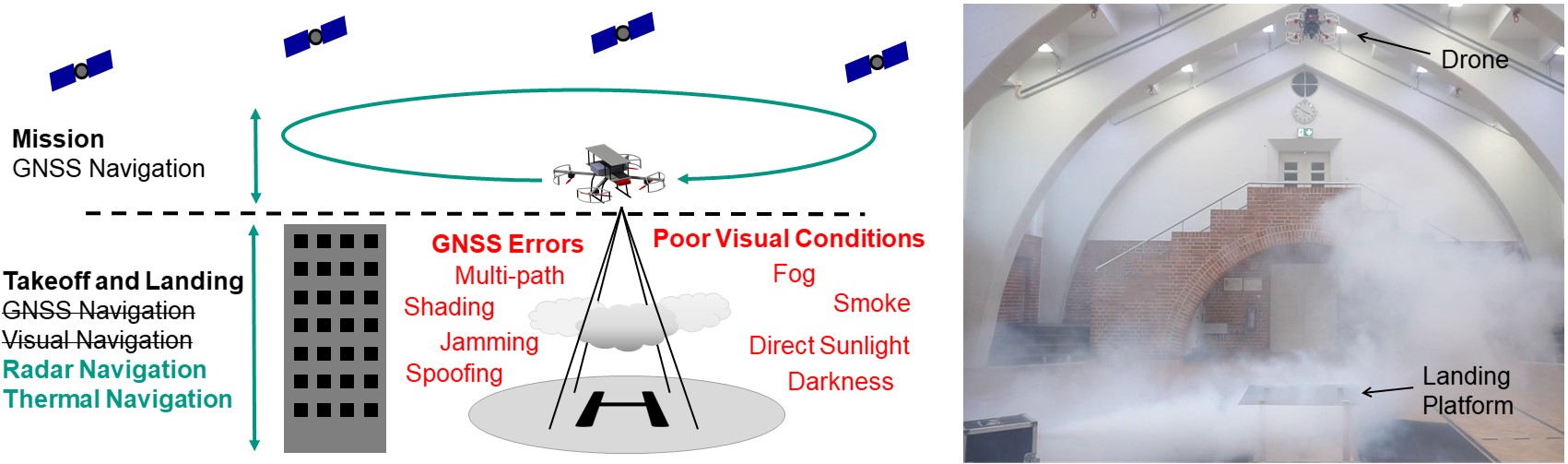
Precision Takeoff and Landing
Precision Takeoff and Landing even in challenging visual conditions such as darkness, fog or smoke enabling robust autonomous UAS operation.