
Indoor Laser-based SLAM for Micro Aerial Vehicles
Christopher Doer, Georg Scholz and Gert F. Trommer
Journal Gyroscopy and Navigation, 2017
[Paper]
Abstract
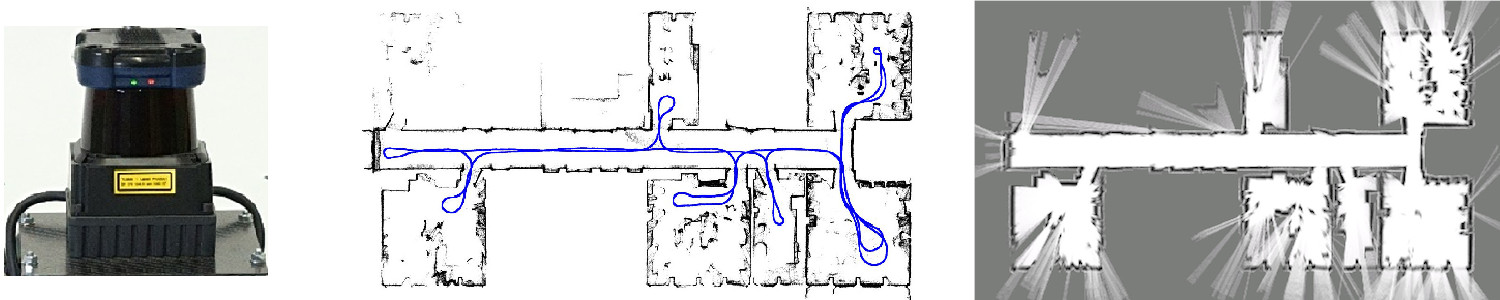
This article presents a laser-based 2D simultaneous localization and mapping (SLAM) algorithm for indoor environments. An adaption and optimization of a ground vehicle SLAM solution (TinySLAM) for the use with Micro Aerial Vehicles is proposed. Optimizations of the map update strategy and a motion model improves the accuracy strongly. An extension to 3D mapping is introduced. The presented algorithm is tested with simulated and real world data. The optimized SLAM solution maps a whole floor of an office building very accurately and achieves embedded real-time capability.
Cite
@article{DoerJGN2017,
author = {Doer, Christopher and Scholz, Georg and Trommer, G.},
year = {2017},
month = {07},
pages = {181-189},
title = {Indoor laser-based SLAM for micro aerial vehicles},
volume = {8},
journal = {Gyroscopy and Navigation},
doi = {10.1134/S2075108717030038}
}