
Inertial Sensor Data based Motion Estimation aided by Image Processing and Differential Barometry
Christopher Doer, Georg Scholz, Jan Ruppelt and Gert F. Trommer
25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), 2018
[Paper]
Abstract
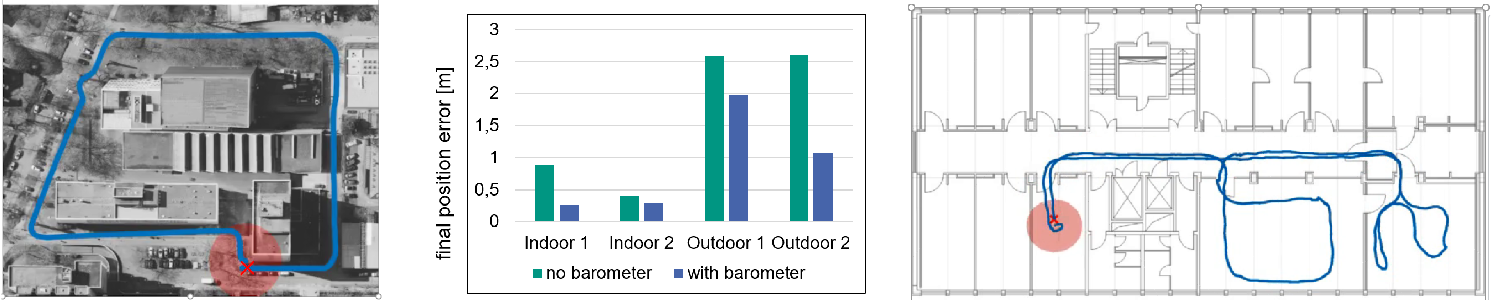
In this paper, a navigation filter is presented that can be used for pedestrian navigation or autonomous micro aerial vehicles (MAV) in the context of search and rescue missions. The proposed system does not rely on external infrastructure and does not make any geometric assumptions on the environment. Point to point navigation tasks are addressed as these are typical for search and rescue scenarios. Therefore, a high accuracy odometry approach is applied. The proposed system fuses sensor data of a mono camera, an IMU and a barometer. In particular, a filter-based approach to visual inertial odometry (VIO) is extended by the fusion with a barometer. Additionally, a tightly coupling between image processing and filter state is applied such that a robust feature tracking and a standstill detection is achieved. The proposed system is evaluated with both simulated and real world datasets. The navigation solution is estimated consistently at IMU rate. The final position error is below one percent of the distance traveled on real world datasets.
Cite
@INPROCEEDINGS{DoerICINS2018,
author={Doer, C. and Scholz, G. and Ruppelt, J. and Trommer, G. F.},
booktitle={2018 25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS)},
title={Inertial sensor data based motion estimation aided by image processing and differential barometry},
year={2018},
volume={},
number={},
pages={1-10},
doi={10.23919/ICINS.2018.8405839}}
}