
Autonomous Precision Takeoff and Landing System for VTOLs in Degraded Visual and GNSS Denied Environments
Christopher Doer, Ronja Koenig, Eige Stumpf and Gert F. Trommer
Deutsche Gesellschaft für Luft- und Raumfahrt - Lilienthal-Oberth e.V., Bonn, 2020
[Paper]
Abstract
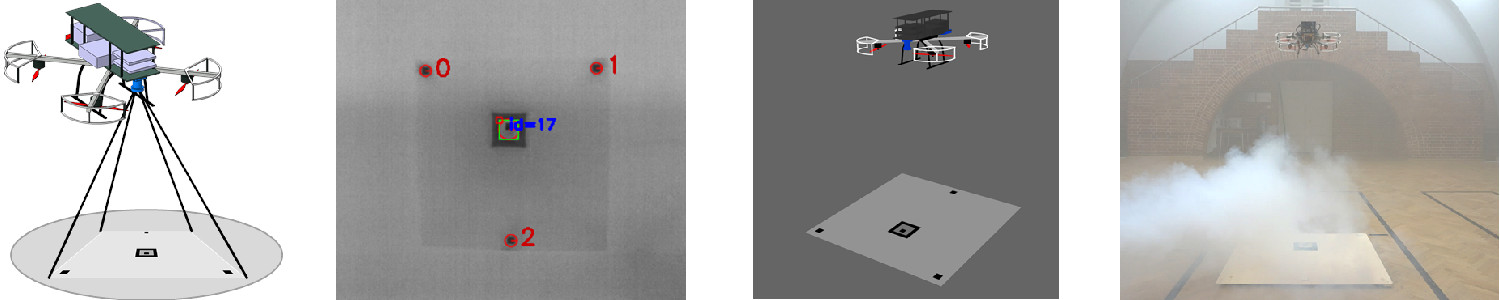
Vertical Takeoff and Landing Systems (VTOLs) offer huge potential for various use cases. During the critical flight phases of takeoff and landing, a safe and reliable flight operation is crucial. This paper presents an autonomous precision takeoff and landing system based on thermal imaging. As thermal imaging is not affected by poor visibility, safe and reliable navigation is enabled. Inspired by visual approaches, a landing platform with thermal makers is developed. A downfacing thermal camera detects the landing platform and enables precision takeoff and landing. The proposed system is evaluated in simulation and in test flights with a motion capture system. Demonstrations in bad visual conditions prove the approach. A comparison to a previously developed radar-based precision takeoff and landing system is carried out.
Cite
@INPROCEEDINGS{DoerDLRK020,
author={Doer, Christopher and Koenig, Ronja and Trommer, Gert F. and Stumpf, Eike},
booktitle={Deutsche Gesellschaft für Luft- und Raumfahrt - Lilienthal-Oberth e.V.. },
title={Autonomous Precision Takeoff and Landing System for VTOLs in Degraded Visual and GNSS Denied Environments},
year={2020},
doi={https://doi.org/10.25967/530121}}