
GNSS aided Radar Inertial Odometry for UAS Flights in Challenging Conditions
Christopher Doer, Jamal Atman and Gert F. Trommer
2022 IEEE Aerospace Conference (AeroConf)
[Paper] [Code] [Datasets]
Abstract
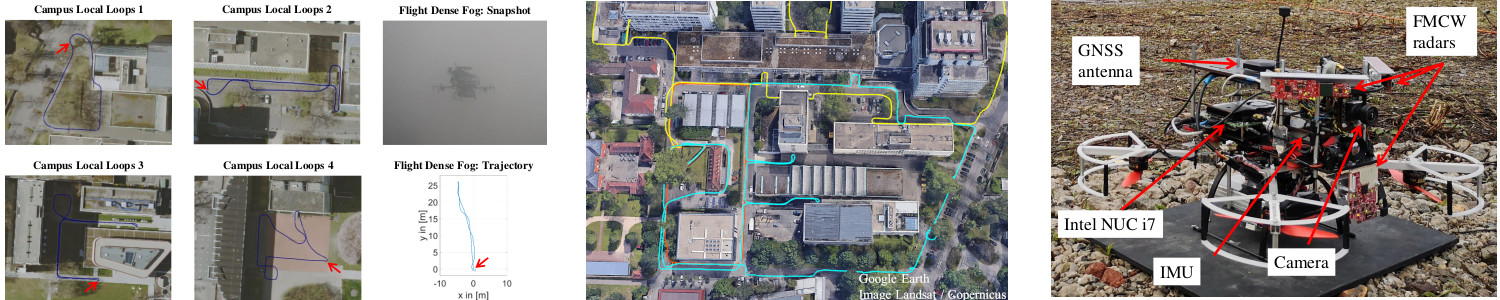
An accurate and robust global navigation system is a key component for autonomous Unmanned Aerial Systems (UAS). In this context, great challenges arise particularly navigating in poor visual conditions caused by darkness, fog or smoke, and in GNSS degraded or denied environments. Vision based approaches tend to fail in such conditions and pure GNSS based navigation fails close to buildings. Therefore, we propose a novel global navigation system based on GNSS and Radar Inertial Odometry (GNSS-RIO). Radar is not affected by such challenging conditions and GNSS adds global information to the system. Our approach is evaluated extensively in urban outdoor environments with huge buildings and vegetation. In GNSS denied environments, we achieve better results than state of the art monocular Visual Inertial Odometry (VIO) despite good visual conditions. On large scale urban datasets, our approach estimates the global position with an average accuracy of 1m using standard GPS without RTK or further correction services. Our approach is computational efficient and runs 18 times faster than real-time on a small embedded computer. Thus, it is well suited even for lightweight UAS.
Cite
@INPROCEEDINGS{DoerAeroConf2022,
author = {Doer, Christopher and Atman, Jamal and Trommer, Gert F.},
title = { GNSS aided Radar Inertial Odometry for UAS Flights in Challenging Conditions },
booktitle={2022 IEEE Aerospace Conference (AeroConf},
year={2022}
}