About me
My name is Christopher Doer. I am a software engineer with 7+ years experience coding C++ and Python. I have expert knowledge in real-time sensor fusion and state estimation, localization and mapping (SLAM) and computer vision. In addition to my research background (Ph.D. completed in 2022), I have proven experience building real world systems. I like to work in an international team, to solve challenging engineering problems and to create technology which improves our everyday life!
I am currently working at Google AR in Munich, GER. Before that, I worked in the perception team of Everyday Robots. Before joining EDR, I completed my Ph.D. (Dr.-Ing.) at the Institute of Control Systems (IRS), Karlsruhe Institute of Technology (KIT), Germany, supervised by Prof. Gert F. Trommer. My Ph.D. focused on multi-sensor navigation and mapping even in challenging conditions (e.g. fog, darkness). Before that, I obtained my B.Sc. and M.Sc. in Electrical Engineering at KIT. During my studies I gained further experience doing several internships and research assistant jobs in Germany and the USA.
Recent News
- 12/2024: AndroidXR is announced, proud to be part of the team building it!
- 05/2023: I am happy to share that I joined Google AR.
- 09/2022: I am super excited to share that I joined the perception team of Everyday Robots as software engineer. Born from X, the moonshot factory, and working alongside teams at Google, we are building a new type of robot. One that can learn by itself, to help anyone with (almost) anything.
- 08/2022: My Ph.D. thesis on multi-sensor navigation and mapping in challenging conditions is published. You can find the whole thesis (in German) here.
- 07/2022: I successfully defended my Ph.D. thesis “summa cum laude”!
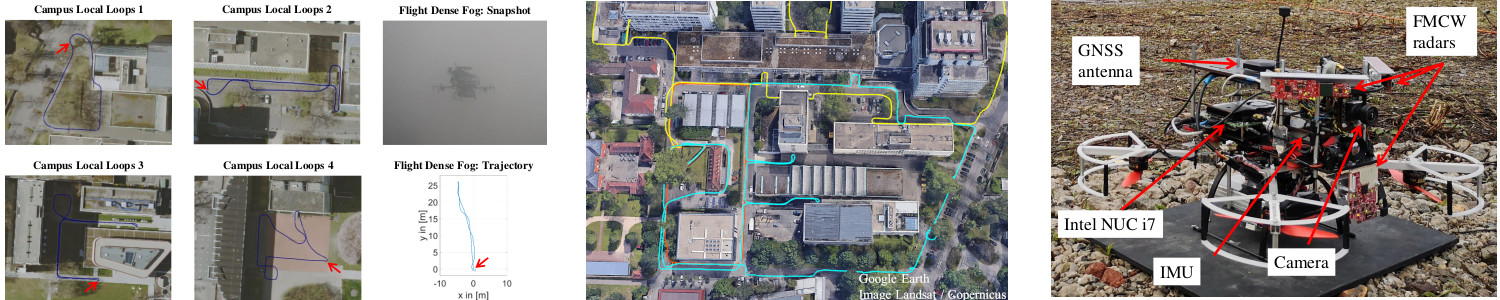
- 04/2022: Our AeroConf paper GNSS aided Radar Inertial Odometry for UAS Flights in Challenging Conditions, source code gnss_x_rio and KIT Campus Global Loops Datasets are published.
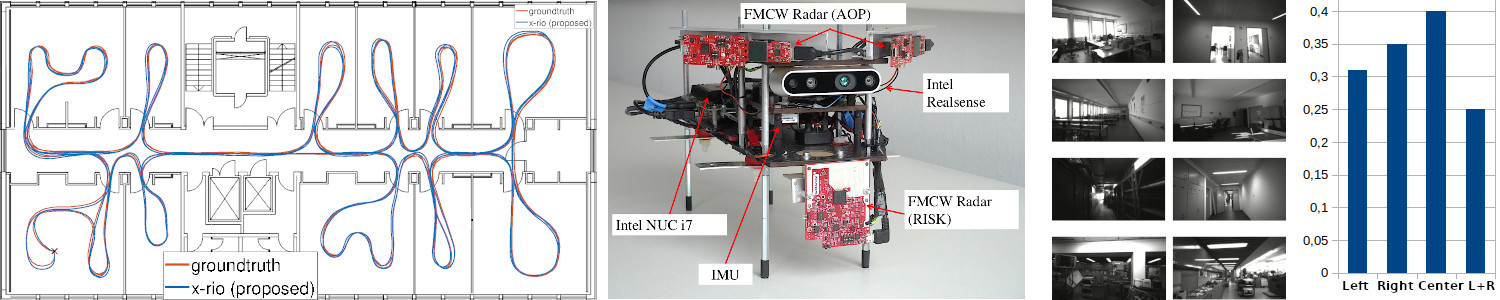
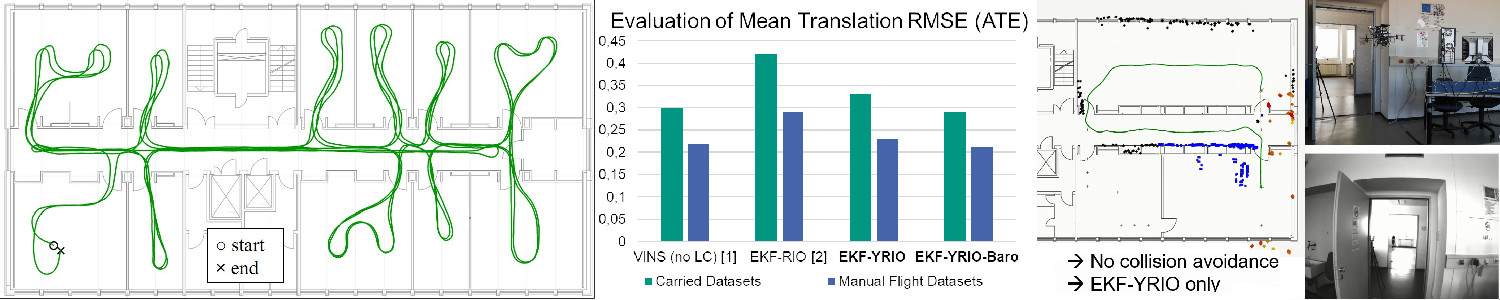
- 03/2022: Our Journal paper x-RIO: Radar Inertial Odometry with Multiple Radar Sensors and Yaw Aiding is published. The code is released as open source: x_rio. The datasets with ground truth are also available.
- 09/2021: Check out our IROS 2021 paper on RRxIO combining radar ego velocity estimates with Visual Inertial Odometry (VIO) or Thermal Inertial Odometry (TIO). The code is released as open source: RRxIO. The radar-thermal-visual-inertial datasets with ground truth are also available.
- 09/2021: REVE - Radar Ego Velocity Estimator: Robust 3D ego velocity estimation using 4D mmWave radar sensors is released as open source.
- 06/2021: The radar inertial datasets with pseudo ground truth used in our recent paper on Yaw aided Radar Inertial Odometry are available here.
- 05/2021: RIO - Radar Inertial Odometry and Radar based Ego Velocity Estimation is released as open source here.
- 04/2021: Website launched!
Ph.D. Research
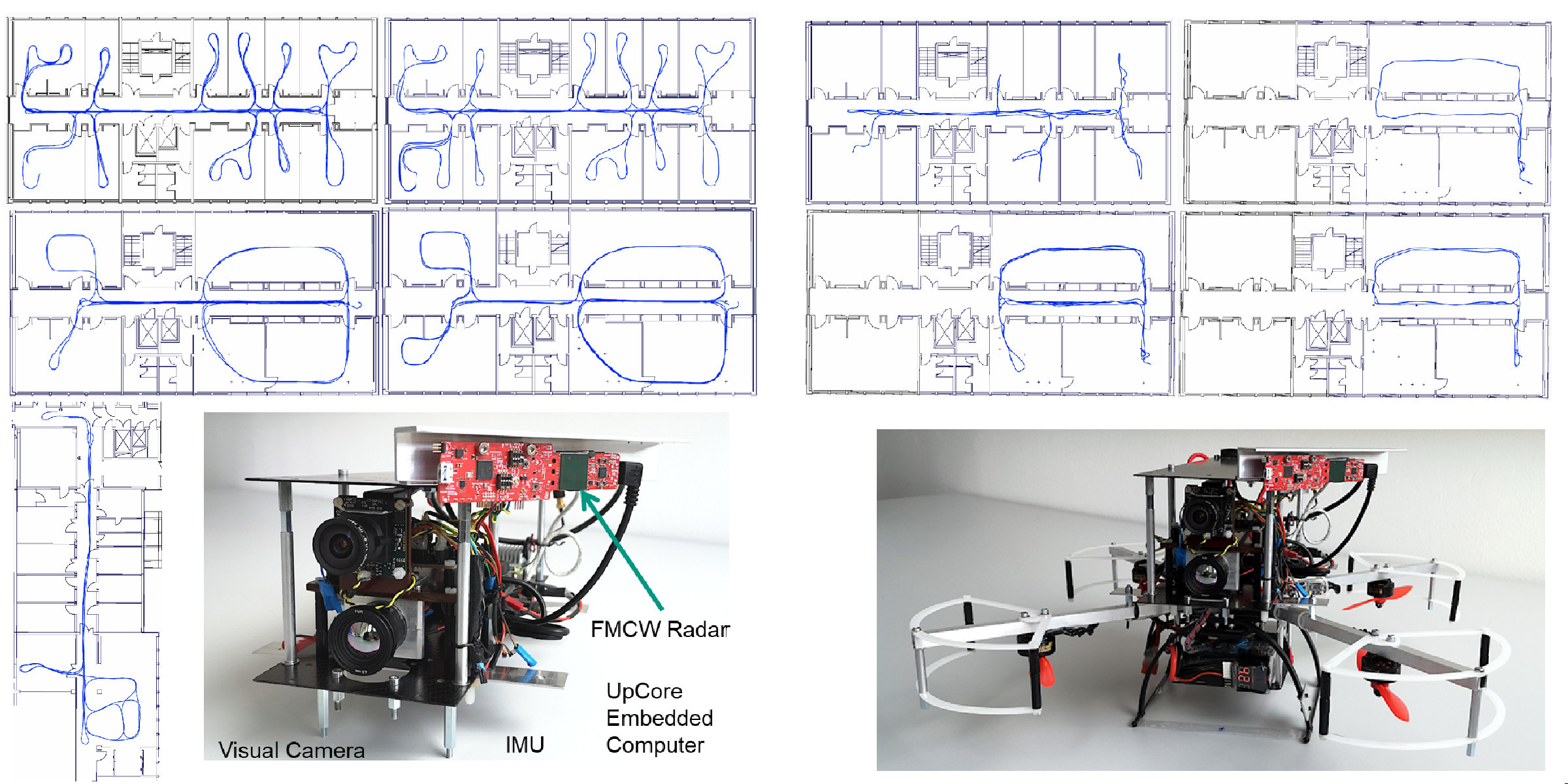
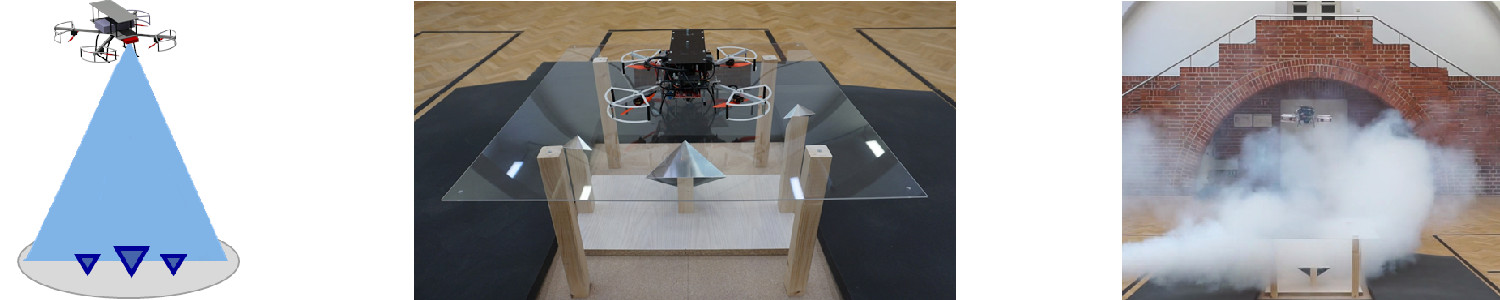
My main research focus was the robust and reliable navigation of aerial vehicles even in challenging visual conditions such as darkness or fog and in GNSS degraded or GNSS denied environments. I have been working on multi domain approaches with FMCW radar, thermal imaging and inertial sensing. I demonstrated these approaches for takeoff and precision landing and online navigation of autonomous drones successfully even in degraded visual conditions.
Publications
GNSS aided Radar Inertial Odometry for UAS Flights in Challenging Conditions
Christopher Doer, Jamal Atman and Gert F. Trommer
2022 IEEE Aerospace Conference (AeroConf)
[Details] [Paper] [Code] [Datasets]
x-RIO: Radar Inertial Odometry with Multiple Radar Sensors and Yaw Aiding
Christopher Doer and Gert F. Trommer
Journal Gyroscopy and Navigation 2022
[Details] [Paper] [Code] [Datasets]
Radar Visual Inertial Odometry and Radar Thermal Inertial Odometry: Robust Navigation even in Challenging Visual Conditions
Christopher Doer and Gert F. Trommer
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
[Details] [Paper] [Code] [Datasets]

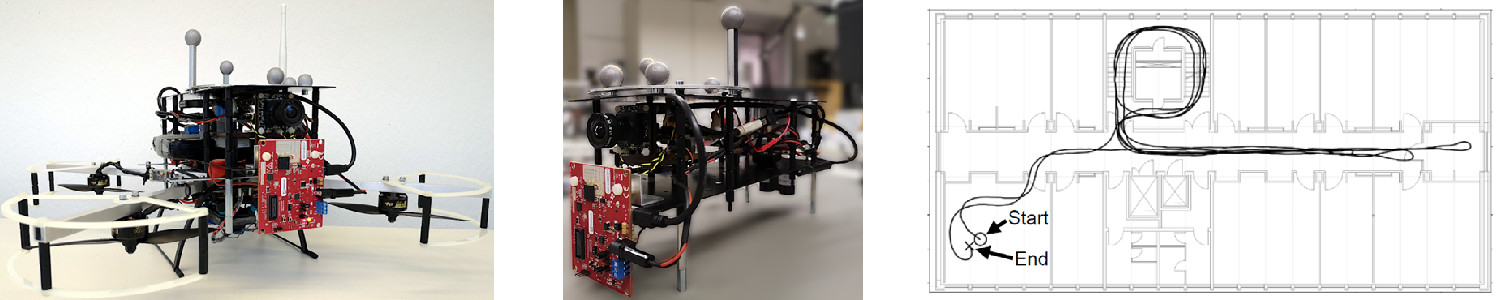
Yaw aided Radar Inertial Odometry using Manhattan World Assumptions
Christopher Doer and Gert F. Trommer
28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), 2021
[Details] [Paper] [Code] [Datasets] [Video_1] [Video_2]
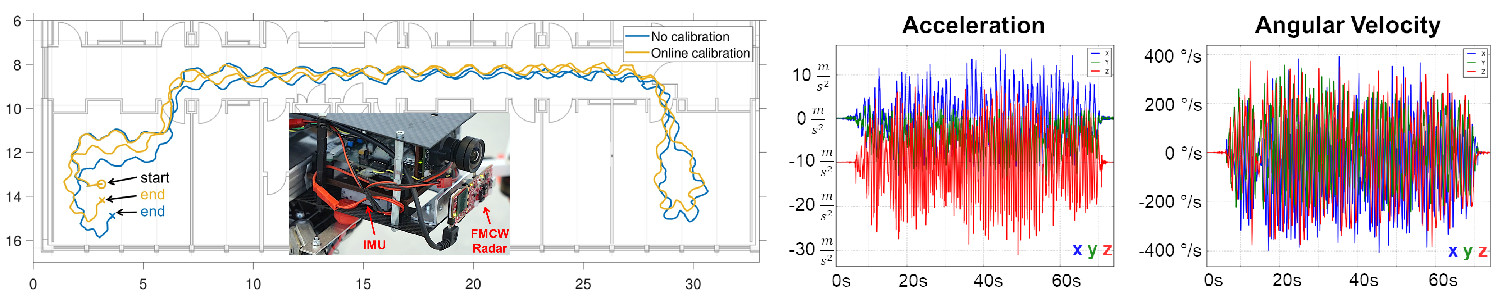
Radar Inertial Odometry with Online Calibration
Christopher Doer and Gert F. Trommer
European Navigation Conference (ENC), 2020
[Details] [Paper] [Video] [Code]
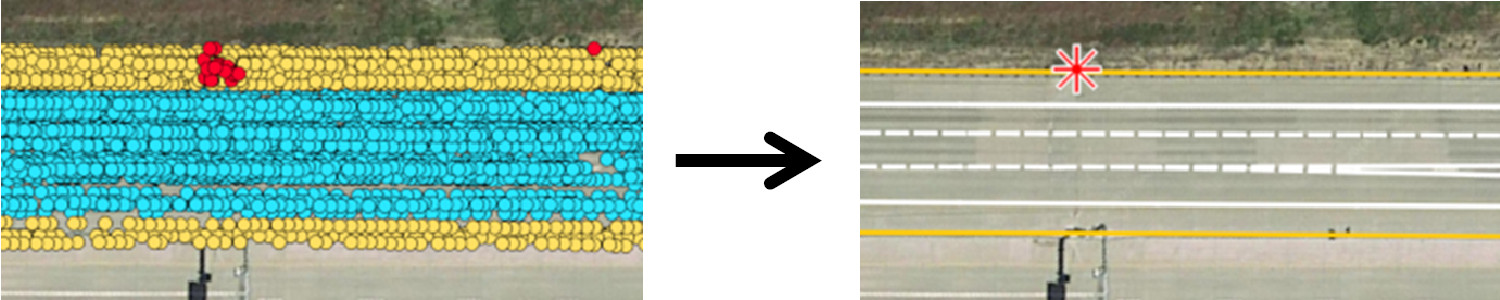
HD Map Generation from Vehicle Fleet Data for Highly Automated Driving on Highways
Christopher Doer, Michael Henzler, Heiner Messner and Gert F. Trommer
IEEE Intelligent Vehicles Symposium (IV), 2020
[Details] [Paper]
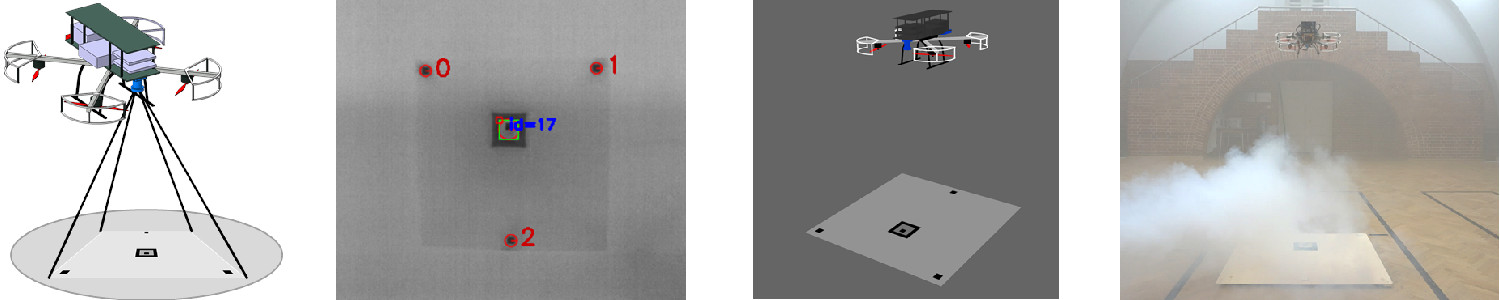
Autonomous Precision Takeoff and Landing System for VTOLs in Degraded Visual and GNSS Denied Environments
Christopher Doer, Ronja Koenig, Eige Stumpf and Gert F. Trommer
Deutsche Gesellschaft für Luft- und Raumfahrt - Lilienthal-Oberth e.V., Bonn, 2020
[Details] [Paper]
An EKF Based Approach to Radar Inertial Odometry
Christopher Doer and Gert F. Trommer
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, 2020
[Details] [Paper] [Code]
Radar Based Autonomous Precision Takeoff and Landing System for VTOLs in GNSS Denied Environments
Christopher Doer, Ronja Koenig, Eike Stumpf and Gert F. Trommer
International Conference on Unmanned Aircraft Systems (ICUAS), 2020
[Details] [Paper]
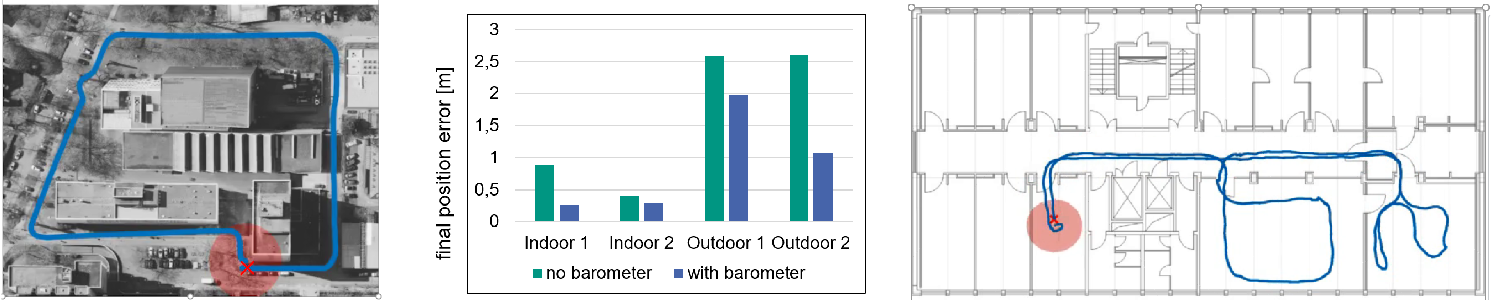
Inertial Sensor Data based Motion Estimation aided by Image Processing and Differential Barometry
Christopher Doer, Georg Scholz, Jan Ruppelt and Gert F. Trommer
25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), 2018
[Details] [Paper]
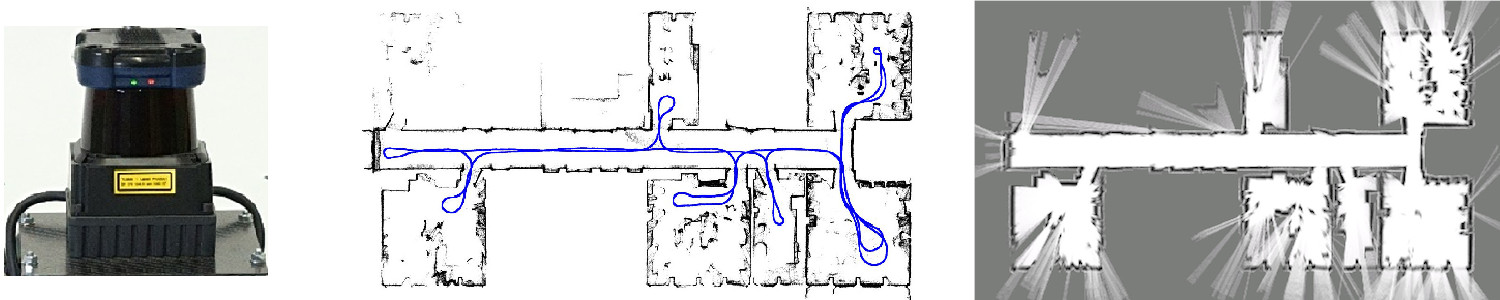
Indoor Laser-based SLAM for Micro Aerial Vehicles
Christopher Doer, Georg Scholz and Gert F. Trommer
Journal Gyroscopy and Navigation, 2017
[Details] [Paper]
Datasets
Multi Radar Inertial Datasets JGN 2022
Multi Radar Inertial indoor datasets with pseudo ground truth 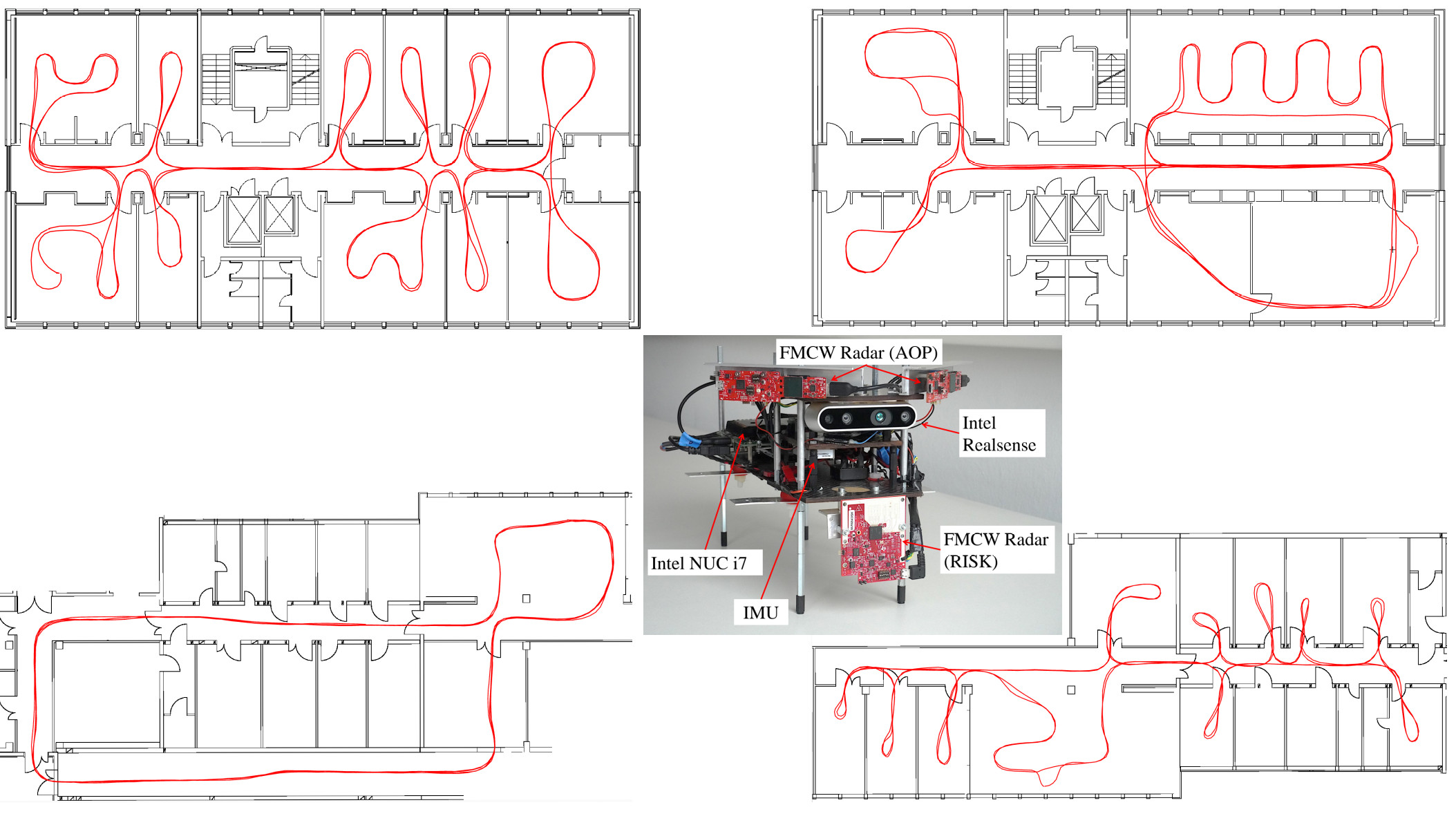
IRS RTVI Datasets IROS 2021
Radar Thermal Visual Inertial datasets with ground truth in good and in challenging visual conditions. 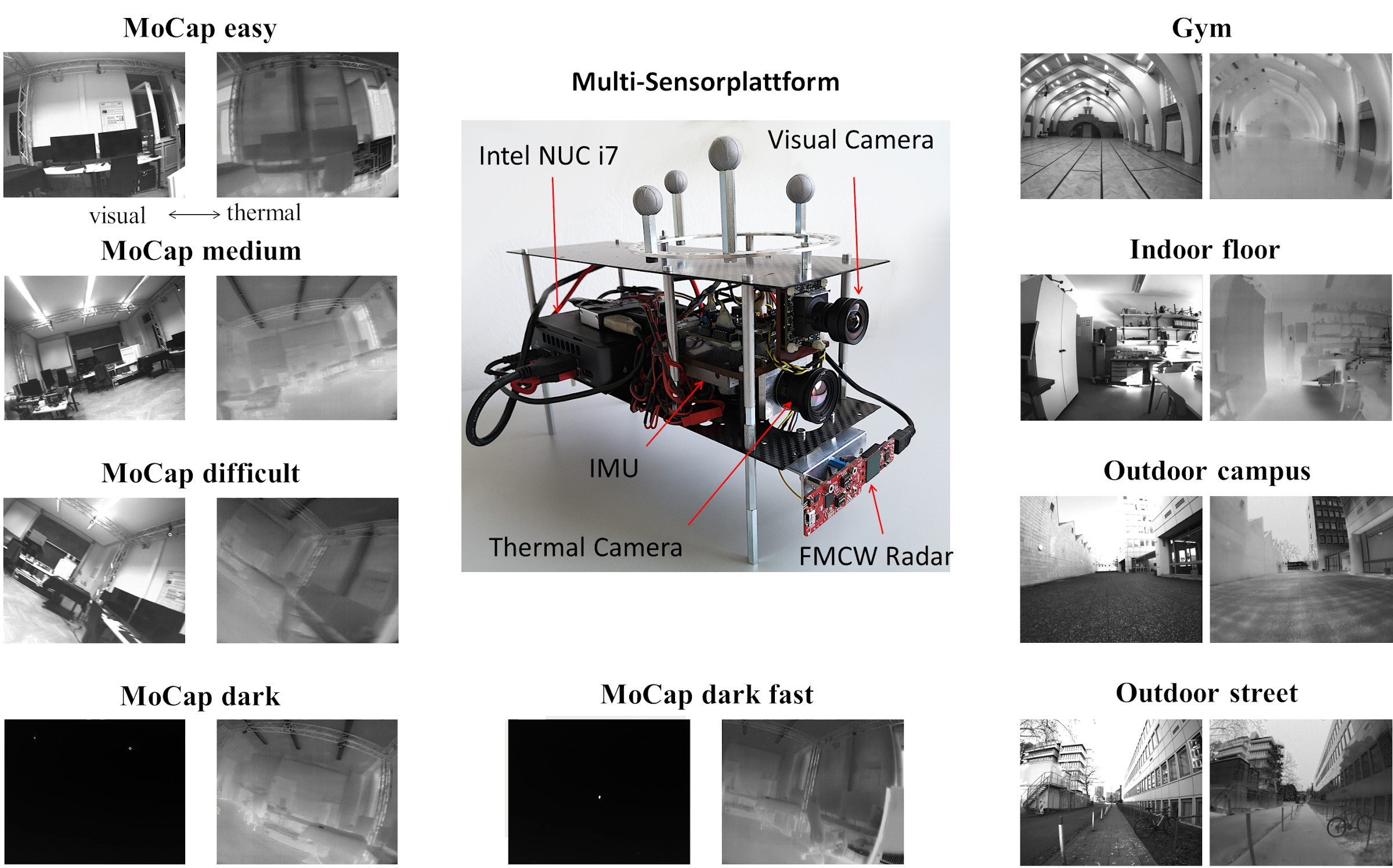
Radar Inertial Datasets ICINS 2021
Radar Inertial indoor datasets with pseudo ground truth: 5 carried (left) and 4 manual flight (right) datasets