Publications
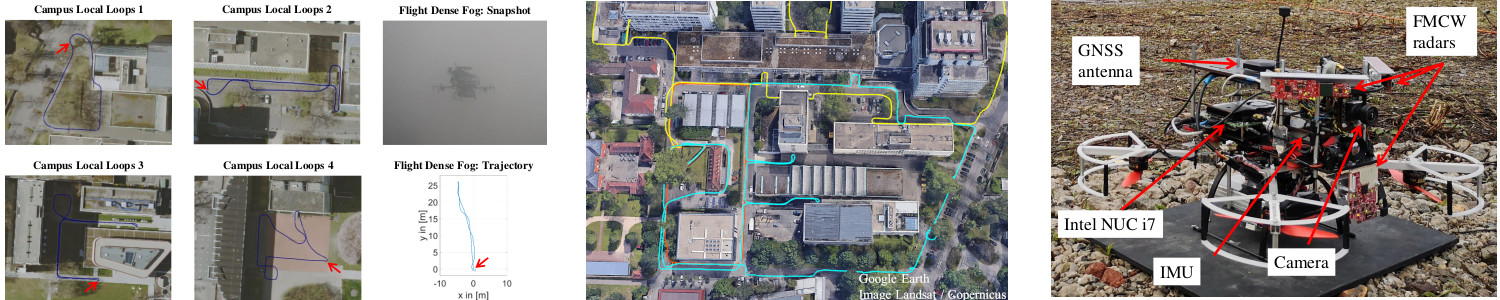
GNSS aided Radar Inertial Odometry for UAS Flights in Challenging Conditions
Christopher Doer, Jamal Atman and Gert F. Trommer
2022 IEEE Aerospace Conference (AeroConf)
[Details] [Paper] [Code] [Datasets]
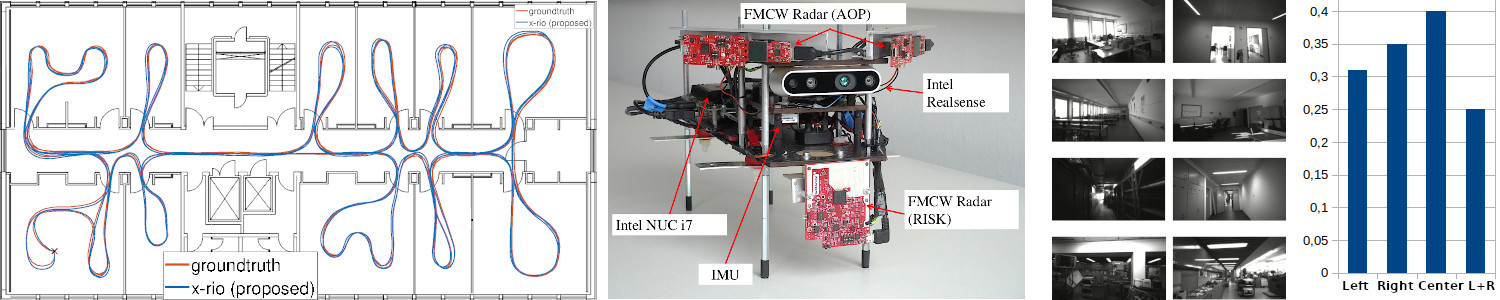
x-RIO: Radar Inertial Odometry with Multiple Radar Sensors and Yaw Aiding
Christopher Doer and Gert F. Trommer
Journal Gyroscopy and Navigation 2022
[Details] [Paper] [Code] [Datasets]
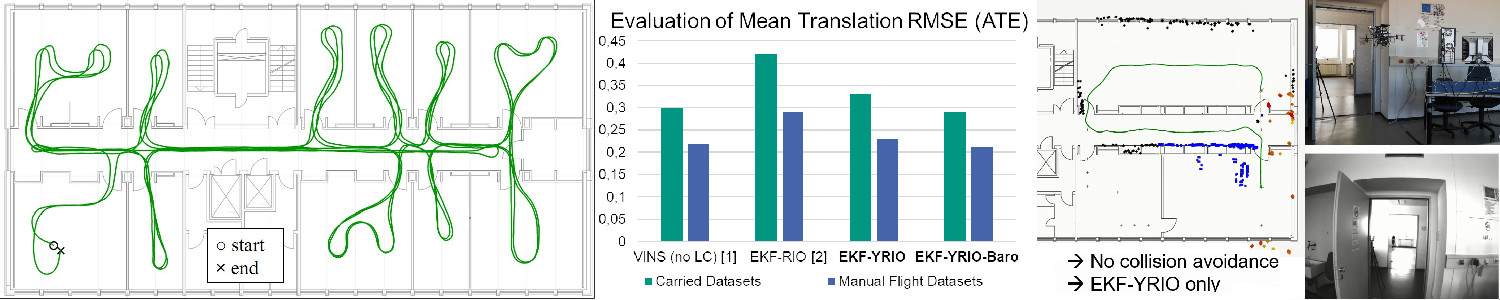
Radar Visual Inertial Odometry and Radar Thermal Inertial Odometry: Robust Navigation even in Challenging Visual Conditions
Christopher Doer and Gert F. Trommer
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2021)
[Details] [Paper] [Code] [Datasets]

Yaw aided Radar Inertial Odometry using Manhattan World Assumptions
Christopher Doer and Gert F. Trommer
28th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), 2021
[Details] [Paper] [Code] [Datasets] [Video_1] [Video_2]
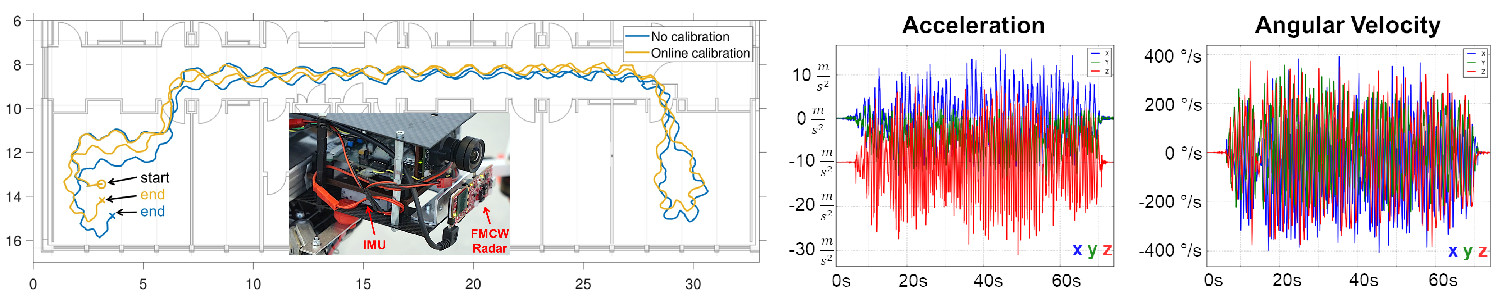
Radar Inertial Odometry with Online Calibration
Christopher Doer and Gert F. Trommer
European Navigation Conference (ENC), 2020
[Details] [Paper] [Video] [Code]
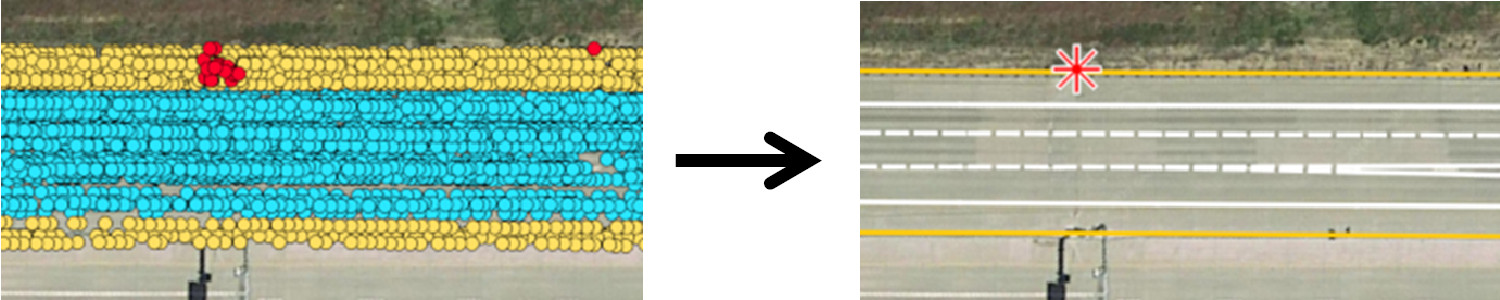
HD Map Generation from Vehicle Fleet Data for Highly Automated Driving on Highways
Christopher Doer, Michael Henzler, Heiner Messner and Gert F. Trommer
IEEE Intelligent Vehicles Symposium (IV), 2020
[Details] [Paper]
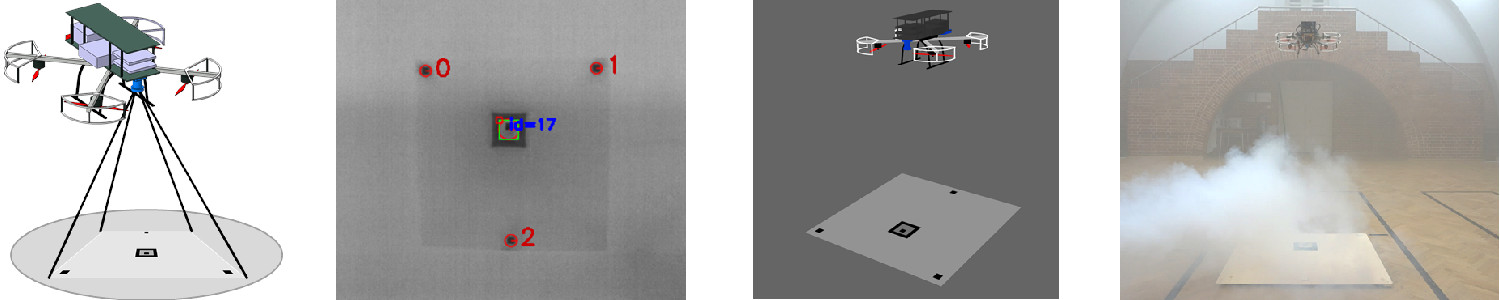
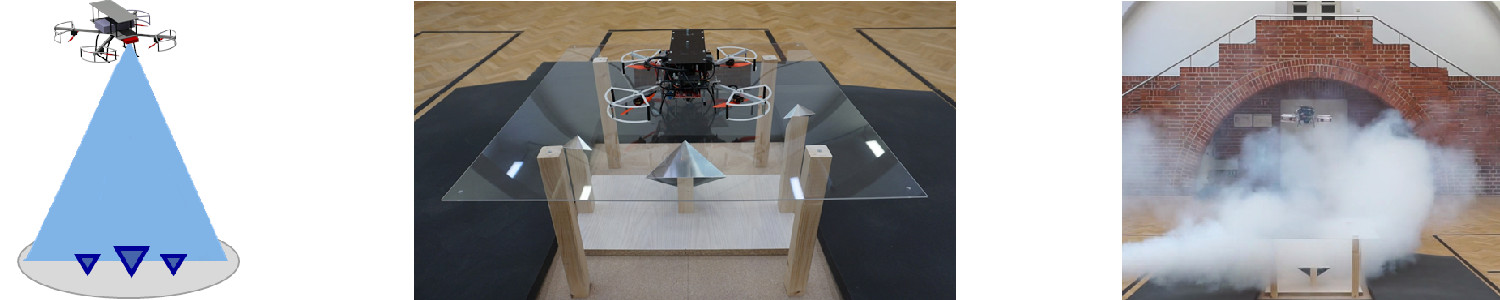
Autonomous Precision Takeoff and Landing System for VTOLs in Degraded Visual and GNSS Denied Environments
Christopher Doer, Ronja Koenig, Eige Stumpf and Gert F. Trommer
Deutsche Gesellschaft für Luft- und Raumfahrt - Lilienthal-Oberth e.V., Bonn, 2020
[Details] [Paper]
An EKF Based Approach to Radar Inertial Odometry
Christopher Doer and Gert F. Trommer
IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems, 2020
[Details] [Paper] [Code]
Radar Based Autonomous Precision Takeoff and Landing System for VTOLs in GNSS Denied Environments
Christopher Doer, Ronja Koenig, Eike Stumpf and Gert F. Trommer
International Conference on Unmanned Aircraft Systems (ICUAS), 2020
[Details] [Paper]
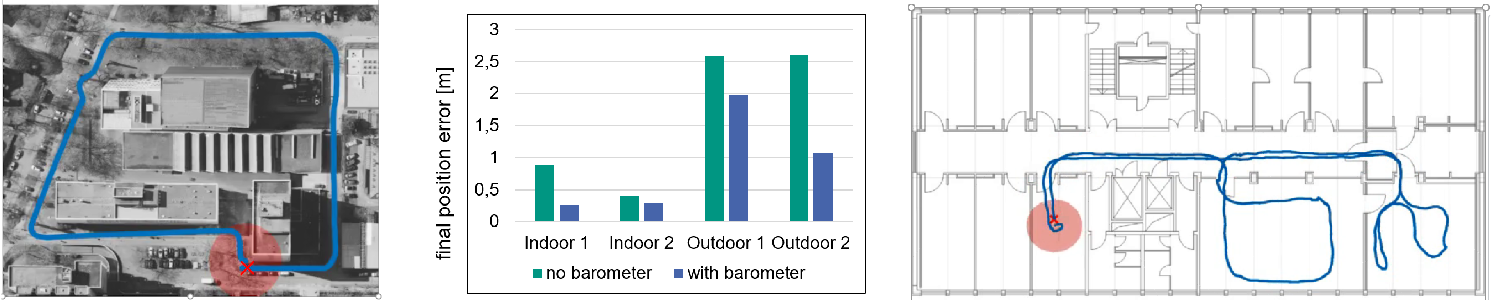
Inertial Sensor Data based Motion Estimation aided by Image Processing and Differential Barometry
Christopher Doer, Georg Scholz, Jan Ruppelt and Gert F. Trommer
25th Saint Petersburg International Conference on Integrated Navigation Systems (ICINS), 2018
[Details] [Paper]
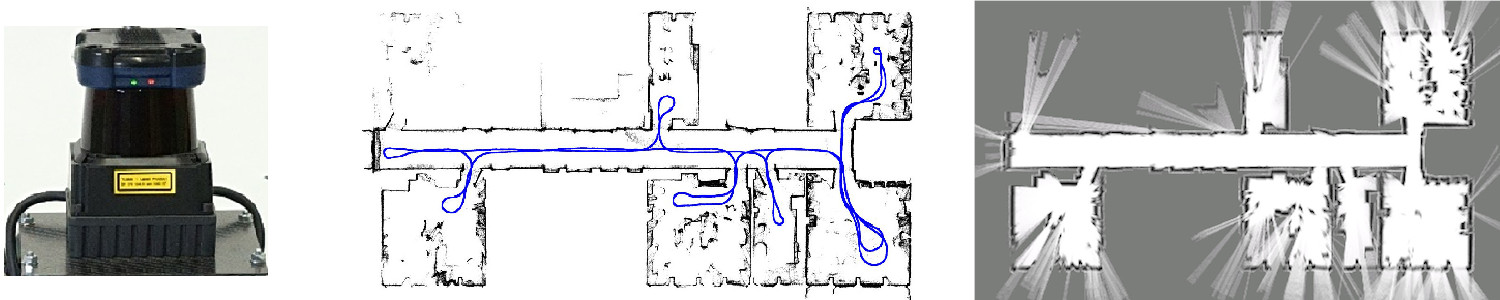
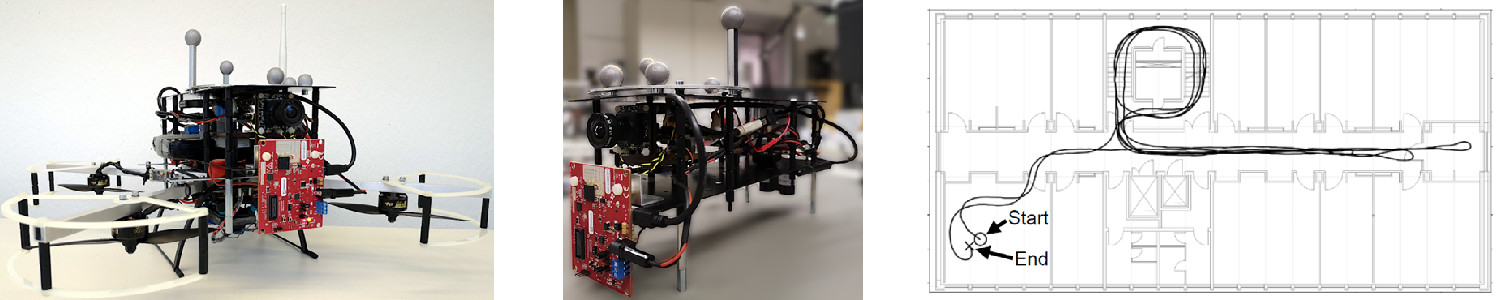
Indoor Laser-based SLAM for Micro Aerial Vehicles
Christopher Doer, Georg Scholz and Gert F. Trommer
Journal Gyroscopy and Navigation, 2017
[Details] [Paper]